1.4. Вибір алгоритму управління об’єктами
Динамічні властивості об’єктів управління дають змогу розробникам систем автоматики на стадії проектування визначити алгоритм управління. Для цього слід проаналізувати співвідношення між постійною часу та часом запізнювання. Відомо, іцо
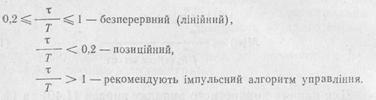
При визначенні алгоритму управління необхідно пам’ятати, що структура передаточної функції повинна відповідати виразам (1.16) та (1.17). Метод інтегральних площин дає більш складну структуру. У цьому випадку:
за передаточною функцією знаходять оригінал, за яким будують криву розгону;
крива розгону (побудована) апроксимується графічним способом, яких би динамічних властивостей не мали зазначені об’єкти;
розраховані параметри передаточної функції використовуються для визначення алгоритму управління.
Лінійний алгоритм управління — один із найпоширеніших у сільськогосподарському виробництві. Він включає пропорційний, інтегральний, пропорційно-інтегральний, про- порційно-диференційований, пропорційно-інтегрально-ди- ференційований. Кожний з них має свої недоліки та переваги.
У практиці проектування для конкретного об’єкту вибирають такий алгоритм, який би забезпечив один із трьох типових перехідних процесів: аперіодичний, із 20 %-ним перерегулюванням, із мінімальним інтегральним показником якості (рис. 1.26). Аперіодичний характеризується максимальним динамічним відхиленням, мінімальним часом регулювання та відсутністю перерегулювання, із 20 %- ним регулюванням — середній по якості перехідний процес, із мінімальним інтегральним показником якості (площа
|
|

між кривою перехідного процесу та віссю часу мінімальна) — значним перерегулюванням, найбільшим часом регулювання та мінімальним динамічним відхиленням. Конкретний типовий перехідний процес може бути визначений з урахуванням вимог технологів до відповідного об’єкту управління.
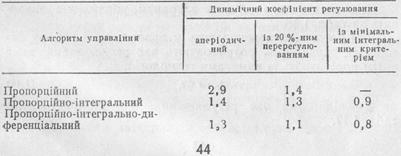
Методика вибору найкращого алгоритма управління полягає у визначенні динамічного коефіцієнта регулювання. Для статичних об’єктів:
![]()
де у\ — максимальне динамічне відхилення; k0—коефіцієнт передачі об’єкта управління; ум— максимально можливе збурення по навантаженню (у відсотках переміщення регулюючого органу).
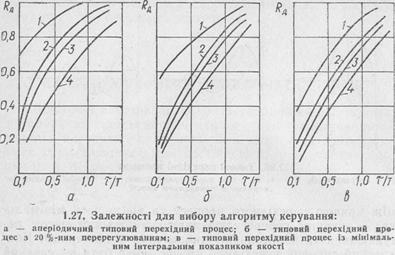
Після цього за графічними залежностями (рис. 1.27) визначають алгоритм управління.
Для астатичних об’єктів:
![]()
де 8о — швидкість розгону об’єкта; т — час запізнювання.
Для астатичного об’єкта алгоритм управління знаходять за табл. 1.16.
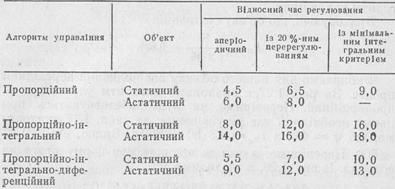
Для того, щоб переконатись у правильності вибору алгоритму управління, розраховують час регулювання, який потім порівнюють із вимогами технологів:
![]()
де -ф — відносний час регулювання, що вибирається за табл. 1.17.
|
|
Для статичних об’єктів відносний час регулювання при інтегральному алгоритмі управління знаходять за допомогою графічних залежностей (рис. 1.28).
Якщо виявиться, що пропорційний алгоритм управління найкращий, у цьому випадку слід визначити статичну похибку та порівняти її з допустимою:
![]()
де А у — статична похибка; /гР, /г — відповідно коефіцієнти передачі регулятора та об’єкту; 5 — коефіцієнт етатизму.
Проте скористатись виразом (1.47) важко, тому що £р — невідомий (регулятор ще не вибраний). Тому рекомендується знайти А у за графічними залежностями (рис. 1.29).
|
1.16. Динамічні коефіцієнти регулювання для астатичних об'єктів
|
|
|