5.6. Автоматизація збирання яєць
Пристрій для управління транспортером для збирання яєць включає в себе лічильник яєць 5 (рис. 5.26) з двома виходами і суматор ІО на три входи. Перший вхід з’єднаний ззадатчиком 9 швидкості транспортера для збирання яєць 1, другий з входом елемента порівняння 12, а виходом через блок управління 6 — з регулюючим приводом 3. До пристрою також входить приймач яєць 2, формувач 13 заданого сигналу, формувач 8 дійсного сигналу, перетворювач маси транспортованих яєць 4, блок ділення 7, блок формування коригуючого сигналу 11. В блоці 11 регульований привід 3 взаємодіє з транспортером збирання яєць 1. Елемент порівняння 12 входами з’єднаний через формувач заданого сигналу 13 із задатчиком 9 швидкості транспортера 1, а через формувач дійсного сигналу 8 — з входом лічильника яєць 5, причому блок ділення 7 одним входом з’єднаний із другим виходом лічильника яєць 5, другим з перетворювачем 4 маси транспортованих яєць, а виходом через — блок формування коригуючого сигналу 11 із третім входом суматора 10.
Принцип дії пристрою такий. Перед ввімкненням пристрою задатчиком 9 задають необхідну швидкість транспортера 1. Після, ввімкнення пристрою транспортер 1 транспортує яйця, які рахує лічильник 5.
З виходу формувача дійсного сигналу 8, сигнал, пропорційний кількості транспортованих яєць, надходить на один із входів елемента порівняння 12, на другий вхід якого надходить сигнал, пропорційний заданому, з формувача заданого сигналу 13. Після порівняння вказаних сигналів сигнал різниці потрапляє на другий вхід суматора 10. Якщо сигнали однакові, то транспортер переміщується регульованим приводом із заданою задатчиком 9 швидкістю.
 Якщо сигнали не однакові, тобто дійсний сигнал більший або менший від заданого, то сигнал різ-
Якщо сигнали не однакові, тобто дійсний сигнал більший або менший від заданого, то сигнал різ-
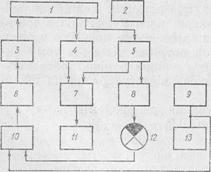
5.26. Схема пристрою для управління транспортером збирання яєць:
1 — транспортер; 2 — приймач яєць; 3 — прнзод; 4 — перетворювач; 5 — лічильник; 6 — блок управління; 7 — блок ділення; 8. 13 — формувачі; 9 — зат,атчик; 10 — суматор; 11 — блок формування; 12 — елемент порівняння
ниці алгебраїчно підсумовується в суматор 10 із сигналом задатчика 9 швидкості транспортера 1, зменшуючи або збільшуючи його регулюючий сигнал, і через блок управління б діє на регульований привод 3, який змінює швидкість транспортера 1, відповідно зменшуючи потік яєць.
Різна маса яєць сприймається перетворювачем маси 4. Сигнал з його виходу про сумарну масу яєць на певній ділянці транспортера 1 (або за певний проміжок часу) надходить на другий вхід блока ділення 7, на перший вхід якого поступає сигнал із другого виходу лічильника 5. Блок ділення визначає відношення цих сигналів і формує сигнал, пропорційний середній масі яєць на даній ділянці транспортера 1 або за певний проміжок часу.
Вказаний сигнал надходить на вхід блока формування коригуючого (за масою) сигналу, де порівнюється з опорним сигналом, що відповідає середній масі для визначення швидкості транспортера для збирання яєць.
Таким чином, залежно від середньої маси яйця в блоці формування коригуючого сигналу 11 формується сигнал тієї чи іншої полярності, який поступає на третій вхід суматора 10.
На вході суматора формується керуючий сигнал, який подається до блока управління 6, що при збільшенні маси яйця швидкість транспортера для збирання яєць 1 зменшується, при зменшенні — збільшується відносно заданого.
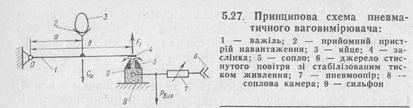
У машинах для автоматичного сортування яєць за масою застосовують ваги з дистанційною передачею вимірювального сигналу. Вони побудовані на базі силовимірювача з автоматичною компенсацією сили маси. На рис. 5.27 зображена принципова схема компенсаційного пневматичного вимірювача маси. Вільний кінець важеля 1 має ван- тажоприймальний пристрій 2 і заслінку 4, яка закриває сопло 5. До сопла через пневмоопір 7 підводиться стиснуте повітря від джерела постійного тиску. Тиск повітря в сопловій камері 8 залежить від зазору між заслінкою 4 і соплом 5. Чим цей зазор менший тим більший тиск у сопловій камері. Повітря що виходить із сопла, діє на заслінку, примушуючи її піднятися. Цю силу знаходимо за формулою:
![]()
де Л — сила, з якою повітря витікає із сопла, діючи на заслінку; 5С — площа ефективного перерізу сопла; РтґХ — тиск у сопловій камері.
Вимірювач маси працює так. Під дією маси яйця 3 заслінка перекриває сопло. Тиск у сопловій камері зростає і відповідно збільшується сила що намагається підняти
|
|
заслінку. Переміщення заслінки 4 вниз і зменшення зазору між нею і соплом відбувається доти, доки це не призведе до такого збільшення тиску в сопловій камері 8, при якому момент від сили відносно точки О обертання важеля 1 не стане дорівнювати моменту відносно цієї ж точки, який створюється масою яйця £?я, тобто:
![]()
де а, Ь — плечі прикладання сили6'я і Г\.
Враховуючи попередню залежність, умову рівноваги важеля 1 можна записати у вигляді:
або![]()
![]()
де![]() — коефіцієнт підсилення маси вимірювача.
— коефіцієнт підсилення маси вимірювача.