3.5. Автоматизація управління мікрокліматом у теплицях
Управління мікрокліматом в теплиці здійснюється за допомогою виконавчих механізмів для регулювання температури і витрат теплоносія (змішувальний клапан ТСК), відкривання і закривання вентиляційних фрамуг (багато- обертові механізми МЭМ, МЭМТ). У системах комбінованого обігрівання передбачене додаткове обігрівання повітря за допомогою калориферів.
Зволоження повітря здійснюється розпиленням води через форсунки, полив грунту — через систему зрошення за допомогою насосів-дозаторів. Приплив сонячної радіації, як правило, не регулюється. Лише окремі конструкції теплиць передбачають розгортання під дахом теплозахисного екрану.
Функціональна схема автоматизації мікроклімату в в теплиці наведена на рис. 3.3.
Системи обігрівання теплиць передбачають грунтове і надгрунтове обігрівання. Теплоносій (вода) надходить з енергопункту і розподіляється між системами обігрівання за допомогою розподільчого колектора. Для грунтового обігрівання використовується частина зворотної води, яка підмішується в розподільчий колектор підмішуючими насосами. Управління полягає в підтриманні в системі грун-
|
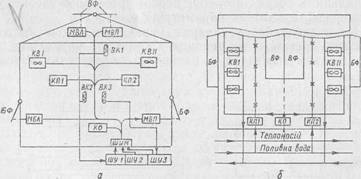
3.3. Схема розміщення технологічного обладнання для управління мікрокліматом у теплиці: а — вигляд збоку; б — вигляд зверху |
тового обігрівання температури води, яка не повинна перевищувати 40 °С.
Температура води в системах обігрівання блочних теплиць забезпечується триходовим змішувальним клапаном (ТСК), встановленим в енергопункті, єдиним для всього блоку теплиць.
Системи обігрівання кожцої ангарної теплиці під’єд- нують до магістралі через індивідуальний вузол, в зворотній лінії якого встановлений двоходовий регулюючий клапан.
Сукупність ангарних теплиць, об’єднаних, спільним дахом у блочну конструкцію, має назву блочних теплиць. Для них характерне управління потужністю всієї системи обігрівання через зміну температури теплоносія, в той час як в ангарних теплицях стабілізація температури досягається зміною витрати теплоносія.
Таким чином, основними управляючими впливами в холодну пору року є зміна температури @т і витрати От теплоносія в системі трубного обігрівання, включення калориферівК, а в теплу пору року — відкриття вентиляційних фрамуг Ф. Волога М7 надходить до теплиці від системи поливу і зрошення, а при наявності повітрообміну також з оточуючого середовища.
Контрольованими параметрами мікроклімату в теплиці є: температура повітря @п; температура грунту 0Г; температура теплоносія 0Т; вологість повітря 'фп.
'Контрольованими параметрами навколишнього середовища (розглядаються як збурення) є: зовнішня температура 03; освітленість Е\ швидкість вітру V; наявність опадів.
Крім контрольованих збурень, на мікроклімат у теплиці впливають вологість зовнішнього повітря, атмосферний тиск тощо. На даний час розроблені схеми автоматичного управління мікрокліматом у теплиці. Всі вони функціонують за принципом компенсації відхилення режимних параметрів від заданих і відрізняються схемн.ими рішеннями, функціональною базою і якістю регулювання.
1. Комплект автоматики КТ-1 передбачає два контури регулювання температури. Перший підтримує температуру теплоносія 0т в системі трубного обігрівання за допомогою ПІ-регулятора, а другий — управляє температурою- повітря 0П в теплиці за допомогою позиційного регулятора з зоною нечутливості +2 °С. При виході температури за межі норми регулятор управляє виконавчими механізмами: клапаном розходу теплоносія або вентиляційними фрамугами.
|
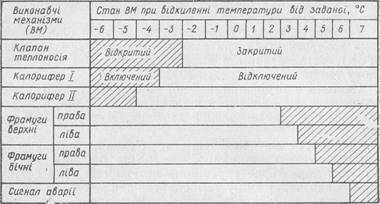
3.2. Карта функціонування комплекту технологічного обладнання |
Двічі на добу реле часу змінює задану температуру повітря 0зад, узгоджуючи її з рівнем освітленості (вночі нижче на 4—6 °С).
При аварійному зниженні температури повітря до 0тт, що свідчить про недостатню потужність системи водяного обігрівання, автоматично вмикається калорифер з власнок> системою регулювання.
2. Комплект УТ-12 складається з системи автоматичного управління температурою повітря, температурою грунту, температурою поливної води, поливом грунту і зволоженням повітря.
Регулювання температури повітря здійснюється за тим же принципом, що і в попередньому випадку, але для підвищення точності використаний принцип багатопозиційного регулювання (табл. 3.2).
Алгоритм управління залежить від знаку і величини відхилення температури від заданої.
Коригування заданої температури здійснюється згідно
з рівнем освітленості на трьох рівнях: £>>10, 2<£-<10 та Е<2 клк.
Система управління температурою грунту підтримує температуру теплоносія в системі підгрунтового обігрівання шляхом двопозиційного управління змішуючим клапаном.
Управління температурою поливної води і концентрацією мінеральних добрив також двопозиційне, причому для поліпшення динамічних характеристик використовується імпульсний переривник. Частота і тривалість поливів, підживлення і досвічення задаються програмно.
|
|
Недоліком комплектів КТ-1 і УТ-12 є автономність усіх контурів управління, що суттєво погіршує якісні показники всієї системи управління мікрокліматом.
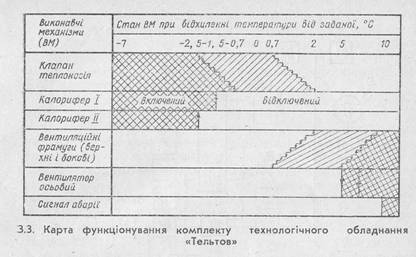
3. Комплект «Тельтов» є найбільш досконалою системою автоматичного управління мікрокліматом у 10 автономних теплицях з коригуванням по збуренням. Регулювання температури здійснюється за принципом багатопо- зиційного регулювання, але карта роботи виконуючих механізмів відрізняється від попередньої величиною установок (табл. 3.3).
На рис. 3.4 зображена схема автоматичної системи управління мікрокліматом «Тельтов».
Поточна температура повітря в кожній теплиці 0П вимірюється 4 датчиками температури. Сигнал розбалансу з підсилювача У1 надходить до порогових елементів 04 і ОБ, які спрацьовують в разі досягнення граничних відхилень температури ©шах і ©Шіп.
Установка регуляторів температури Р1—Р3 коригується підсилювачем — суматором У2 як сума сигналів, пропорційних заданому значенню нічної температури (з елемента О6) та рівню освітленості (з елемента О7). Поточний рівень освітленості Е в межах 0—50 клк вимірюється фотодатчиком ВЬ, перетворюється на постійну напругу 0—2,5 В, і через елемент витримки часу Ю та порогові елементи /)б і 07 надходить до підсилювача У2. Витримка часу в елементі Ш потрібна для забезпечення нечутливості схеми коригування температури при короткочасних -спалахах світла.
|
|
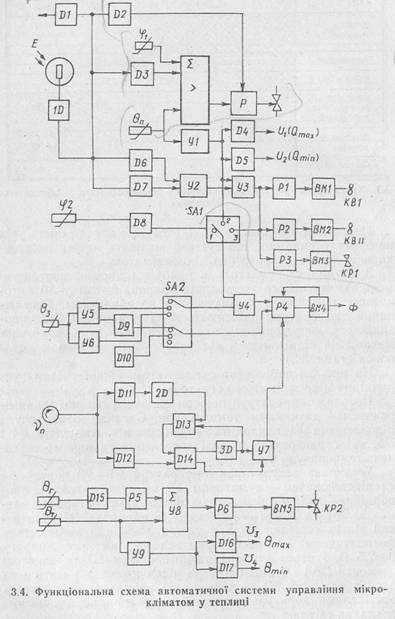
З підсилювача УЗ сигнал надходить до #/-регулятора Р3, який управляє за допомогою виконавчого механізму ВМЗ триходовим регулюючим клапаном КР\ водотрубного обігріву, а також на двопозиційні регулятори Р1 і Р2, які управляють за допомогою виконавчих механізмів ВМ1, ВМ2 двома групами калориферів КВ\ і КВ2.
Якщо система обігрівання теплиці має окремі контури управління грунтовим і повітряним обігрівом, то при пониженні температури регулятор РЗ перемикається на управління повітряним обігрівом тільки після того, як грунтовий обігрів працюватиме на повну потужність.
Система автоматичного управління температурою грунту складається з двох контурів: внутрішнього малоінерцій- ного контура стабілізації температури теплоносія 0Т з ПІ- регулятором Р6 і зовнішнього інерційного контура з П-ре- гулятором Р5, який змінює задану установку ПІ-регуля- тора залежно від температури грунту 0Г. Відхилення температур грунту і теплоносія від заданих вимірюються відповідними датчиками, через елемент £>15, регулятор РЪ і ■ підсилювач-суматор У8 надходять до регулятора Р6, який за допомогою виконавчого механізму ВМ5 та регулюючого клапана КР2 управляє температурою води в системі грунтового обігріву. При обмеженій потужності системи обігрівання контур управління температурою грунту має приорітет по відношенню до контура управління температурою повітря. Переключення ПІ-регулятора температури теплоносія на обігрів повітря відбувається лише після того, як грунтовий обігрів вмикається на повну потужність.
При перегріві повітря до 0тах автоматично вмикається система вентиляції.
Система управління вентиляцією складається з перемикача SA 1, підсилювача-суматора У4, пропорційного регулятора РА, виконавчого механізму ВМ4 та вентиляційних фрамуг Ф. Залежно від стану перемикача 5Л1 регулятор РА працює як стабілізатор температури без коригування освітленості (положення 2) або регулює температуру відповідно з рівнем освітленості (положення 3) чи працює від датчика відносної вологості г|)2 в режимі осушення повітря методом «сухого опалення» (положення 1). Регулятор РА охоплений жорстким зворотнім зв’язком по положенню виконавчого механізму ВМА, що сприяє підвищенню якості управління фрамугами Ф.
Цей же канал управління виключає можливість надходження до теплиці холодного повітря при зниженні температури зовнішнього повітря ©з До мінімальної. Сигнал від датчика зовнішньої температури через підсилювачі У5, У6 і перемикач SA2 надходить до регулятора Р4, який за допомогою ВМ4 закриває фрамуги.
По другому каналу через порогові елементи D9 і D10 до регулятора Р4 надходить сигнал блокування, який забороняє відкриття фрамуг від команд, що надходять з перемикача 5/41. Робота регулятора Р4 на відкриття фрамуг блокується в разі зниження зовнішньої температури до (0—15 °С).
Система вентиляції має змінне обмеження ступеня відкриття фрамуг, яке залежить від зовнішньої температури. Величина зовнішньої температури обмежує відкриття вентиляційних фрамуг в діапазоні 4—40 %/град.
При зниженні зовнішньої температури до мінімальної, а також при підвищеній швидкості вітру відбувається примусове закриття вентиляційних фрамуг.
Швидкість вітру вимірюється анемометром BR, напруга з якого надходить до порогових елементів D11 і D12, які визначають відповідно мінімальне і максимальне значення швидкості вітру. Якщо при закритих фрамугах швидкість вітру досягне максимального значення, то через пороговий елемент D12, логічний елемент «АБО» D14 та підсилювач У7 на регулятор Р4 .надходить сигнал, що блокує відкриття фрамуг від будь-яких інших сигналів.
Якщо фрамуги б$яи відкриті, то сигнал з елемента D14 через елемент витримки часу 3D (< 1 хв) та підсилювач У7 надходить до регулятора Р4 і викликає примусове закриття фрамуг. Таким чином, короткочасне підвищення швидкості вітру не.викликає закриття фрамуг, а лише блокує їх відкриття.
При зменшенні швидкості вітру спрацьовує пороговий елемент ДІЇ і після витримки часу (2D) сигналами на виходах елементів D13 і D14 заборона на відкриття фрамуг знімається.
Управління зволоженням повітря в теплиці здійснюється двопозиційним регулятором Р і виконавчим клапаном КР системи зволоження за сигналами від датчика вологості я|)і або датчиків температури повітря ©п.
Задане значення мінімальної відносної вологості повітря коригується через елемент D3 від датчика BL залежно від освітленості. Датчик і|)і контролює відносну вологість в межах від 45 до 83 %, а коригування по освітленості відбувається в межах 1...7 %. При зменшенні освітленості до заданого рівня елемент D2 блокує схему включення зволоження.
Управління поливами здійснюється за програмою в такій послідовності: пуск, робота, повторний пуск, переривання програми поливу в разі появи команди па зволоження, відновлення поливу після закінчення циклу зволоження і зупинка.
Зупинка програми відбувається також при підвищенні температури поливної води або в разі припинення її подачі, а також при зниженні освітленості нижче 2 клк.
Система управління мікрокліматом «Тельтов» передбачає автоматичне трипозиційпе регулювання вологості повітря. При відхиленні відносної вологості від заданої вмикається система автоматичного управління зволоженням або осушенням повітря. Осушення повітря здійснюється методом «сухого опалення» шляхом підвищення температури-повітря за рахунок калориферного обігрівання з наступним відкриванням вентиляційних фрамуг. При цьому автоматична система управління температурою повітря блокується.
При зменшенні вологості або критичному зростанні температури повітря на 10° вище заданої «сухе опалення» припиняють.
Вночі для зменшення теплових витрат під дахом розгортається теплозахисний екран. Вдень він запобігає радіаційному перегріванню рослин, автоматично розгортаючись при освітленості Е>Етах-
Система автоматичного управління підживленням рослин вуглекислим газом функціонує лише за умов Е^>Ет\п, і|)<С'фтах по концентрації С02, яка вимірюється газоаналізатором. Виконавчі механізми приводяться в дію двопози- ційними регуляторами.