5.5. Автоматизація процесу годівлі курей
Високопродуктивних несучок можна отримати тільки при повноцінному годуванні курей.
Технологічне обладнання, необхідне для проведення цієї операції, було розглянуто в попередніх розділах.
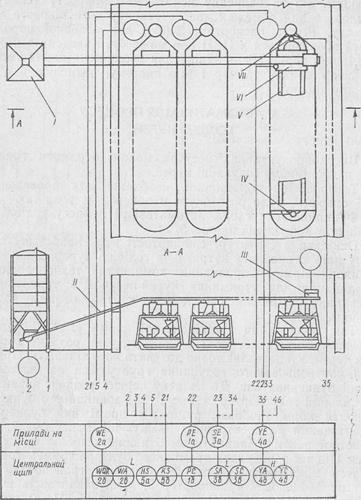
Функціональна схема автоматизації процесу годівлі в пташнику зображена на рис. 5. 24.
Оскільки в структурі собівартості яєць найбільшу питому вагу становлять затрати на годівлю курей, деякі зарубіжні фірми запровадили комплекти технологічного обладнання для утримання курей-несучок в триярусних каскадних кліткових батареях з контрольованим годуванням.
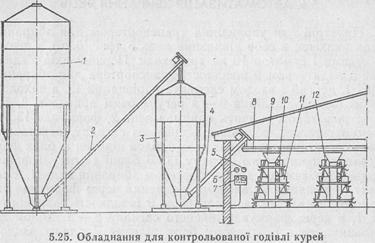
Так, обладнання американської фірми «Биг Дачмап» забезпечує не тільки щоденну автоматичну роздачу корму для курей, а й дозволяє точно дозувати його кількість. Принцип контрольованого годування грунтується на застосуванні бункерних ваг. До початку першої роздачі вивантажувальний транспортер 2 (рис. 5. 25) зовнішнього бункера 1 подає корм (добовий раціон) у проміжний бункер З, змонтований на електронних зважуючих пристроях 7. Ці пристрої разом з індикатором 5 являють собою бункерні ваги. Під час заповнення проміжного бункера кормом транспортер 2, вивантажувальний шнековий транспортер 4, внутрішньоцеховий транспортер 8, який завантажує корм в приймальні колонки 9 кліткових батарей 11, а також ярусні ланцюгові кормороздавачі 12 не можуть працювати через блокування.
Якщо добовий раціон у проміжний бункер уже завантажений, що фіксується на шкалі індикатора, то шнековий транспортер зовнішнього бункера по команді від бункерних ваг відключається.
Годівля курей здійснюється за програмою з використанням спеціального таймера 6, причому роздачу корму можна проводити стільки разів, скільки це необхідно. Ланцюгові кормороздавачі забирають корм із приймальних коло-
|
5.24. Схема автоматизації системи роздачі кормів: І — завантажувальний бункер; II — завантажувальний шнек; НІ — привод поперечного транспортера; IV — ведений вал; V — транспортер роздачі; VI — проміжний бункер; VII — ведучий вал |
нок і розносять його по жолобкових годівницях батарей. Якщо до годівниці потрапить необхідна кількість корму, ланцюговий кормороздавач відключається по команді від таймера 6.Через 2,5 хвилини після того, як добова норма корму видана повністю, від датчика рівня, встановленого в проміжному бункері, відключаються транспортери 4, 8
|
|
і кормороздавачі батарей.. При цьому можуть відключитися тільки транспортери -4. і 8, якщо при переповненні жолобкових Годівниць кінцевий вимикач 10 розриває контакти, одночасно в кормових колонкад перекривається приймальна частина ланцюгових кормороздавачів. В цьому випадку самі кормороздавачі залишаються ввімкнутими. Стоп’ятидесятисекундна затримка сигналу від датчика рівня необхідна для того щоб запобігти відключенню транспортерів 4, 8 і ланцюгових кормороздавачів при незначних переповненнях жолобкових годівниць. Після закінчення останньої роздачі корму, другий програматор забезпечує завантаження проміжного бункера кормів в об’ємі, необхідному для роботи на наступний день.
Робота ланцюгового кормороздавача і датчика рівня регулюється таким чином, щоб усьому поголів’ю забезпечити подачу корму, в т. ч. і при останній денній видачі. Якщо програматори та бункерні ваги правильно відрегулювати, то годування можна здійснювати повністю в автоматичному режимі. Оператор потрібен тільки в тому випадку, коли необхідно змінити денний раціон, тобто кількість корму повинна бути знову відрегульована на шкалі бункерних ваг.
Така автоматизація годування дає економію корму 3— 7 %, а при певних умовах і до 10 %.