6.1. Автоматизація годівлі тварин
Процес годівлі тварин включає технологічні процеси з кормоприготуваиня та роздачі кормів. Корм на тваринницьких фермах у кормоцехах і кормокухнях готують за допомогою спеціалізованих машин, складених у лінії по підготовці окремих видів кормів. За принципом дії машин для приготування кормів поділяються на різальні, подрібню-
|
|
вальні, миючі, розминаючі, перемішуючі і запарюючі. Роздавання кормів здійснюється транспортно-дозувальним обладнанням, принцип дії якого залежить від виду корму. Для сухого корму — це тросово-шайбові транспортери з дозуючими пристроями або звичайні стрічкові транспортери, для зволоженого корму — платформові або мобільні кормороздавачі, для рідкого — кормороздаючі' гідравлічні системи.
До різальних машин належать: соломорізки РСС-6 для різання соломи та подрібнення зелених стеблин, подрібшо- вачі зеленої маси, коренеплодів, кукурудзяних стрижнів типу «Волгар-5», ИКС-5М, КГІИ-4 та інші. Зернові подрібнюють на дробарках типу ДММ, ДКМ-2, ДДР, КДУ та ін. Для змішування та запарювання застосовуються запар- ники-змішувачі АПС-6, ВК-1, С-12 тощо.
Автоматичний пристрій подрібнюючих та різальних машин оснащується комплектами, до яких входять пульт управління, панель регулятора та силова панель. Захист електродвигуна від короткого замикання здійснюється автоматичними вимикачами з комбінованим розчіплюва- чем-перемикачем, настроєним на номінальний струм. Для захисту двигуна від перевантаження застосовують реле ТРП-150А, а також реле максимального струму миттєвої дії.
Автоматичне регулювання навантаження двигуна здійснюється за допомогою датчика струму, підключеного в одну з фаз мережі живлення електродвигуна.
Крім оптимального завантаження електродвигунів машин для приготування кормів, систему управління викорис- вують для послідовного включення машин при їх з’єднанні в потокову технологічну лінію. Розглянемо роботу такої автоматичної системи на прикладі управління лінією по приготуванню коренебульбоплодів.
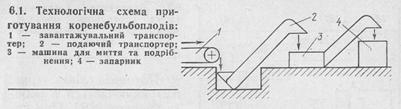
При роботі потокової лінії (рис. 6.1) завантажувальний транспортер 1 подає коренебульбоплоди в подаючий транспортер 2, за допомогою якого вони надходять до миючої та подрібнюючої машини 3. Після подрібнення січка потрапляє в запарник 4, а звідти в кормороздавач.
6.2. Принципова електрична схема управління процесом приготування коренебульбоплодів
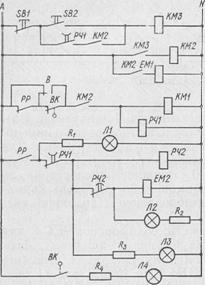 Потокова лінія (рис. 6.2) включається в роботу кнопкою SB 1. При натисканні кнопки SBI одержує живлення магнітний пускач КМ2 електродвигуна подаючого електро- транспортера, а контакти КМ2 замикають коло електромагніта ЕМ\, що подає воду для миття коренів. При цьому пускачКМ1 включає завантажувальний транспортер, а реле часу РЧ1 також замикає свої замикаючі і розмикає розмикаючі контакти. Таким чином, всі машини потокової лінії підключені послідовно проти потоку матеріалу і, тим самим, виключена можливість завалу машин або транспортерів. У баці для запарювання встановлені датчики рівня РР, які при заповненні його до певного рівня відключають завантажувальний транспортер. При цьому в електричній схемі відбуваються такі переключення. Розривається коло живлення пускача КМ\ і реле часу РЧ 1. Пускач КМ\ відключає завантажувальний транспортер і подача продукту в технологічну лінію припиняється. Реле часу через певну витримку часу, достатню для звільнення потокової лінії від продукту, розмикає контакти РЧ 1 в колі котушки пускача /СЛІЗ, що зупиняє всю потокову лінію і припиняє подачу води до мийниці. Одночасно РЧ 1 замкне свої контакти в колі електромагніта ЕМ2, що вмикає подачу пари в кормозапарник. Включається реле часу РЧ2, яке через певний час, достатній для запарювання, розімкне свої контакти, які відключать ЕМ2 і припинять надходження пари. Якщо готовий продукт потрапляє до кормороздавача, то вимикач В повинен знаходитись у лівому замкненому положенні. При наповненні кормороздавача розмикаються контакти кінцевого вимикача ВК, відключається завантажувальний транспортер і після певної витримки часу відключається вся потокова лінія.
Потокова лінія (рис. 6.2) включається в роботу кнопкою SB 1. При натисканні кнопки SBI одержує живлення магнітний пускач КМ2 електродвигуна подаючого електро- транспортера, а контакти КМ2 замикають коло електромагніта ЕМ\, що подає воду для миття коренів. При цьому пускачКМ1 включає завантажувальний транспортер, а реле часу РЧ1 також замикає свої замикаючі і розмикає розмикаючі контакти. Таким чином, всі машини потокової лінії підключені послідовно проти потоку матеріалу і, тим самим, виключена можливість завалу машин або транспортерів. У баці для запарювання встановлені датчики рівня РР, які при заповненні його до певного рівня відключають завантажувальний транспортер. При цьому в електричній схемі відбуваються такі переключення. Розривається коло живлення пускача КМ\ і реле часу РЧ 1. Пускач КМ\ відключає завантажувальний транспортер і подача продукту в технологічну лінію припиняється. Реле часу через певну витримку часу, достатню для звільнення потокової лінії від продукту, розмикає контакти РЧ 1 в колі котушки пускача /СЛІЗ, що зупиняє всю потокову лінію і припиняє подачу води до мийниці. Одночасно РЧ 1 замкне свої контакти в колі електромагніта ЕМ2, що вмикає подачу пари в кормозапарник. Включається реле часу РЧ2, яке через певний час, достатній для запарювання, розімкне свої контакти, які відключать ЕМ2 і припинять надходження пари. Якщо готовий продукт потрапляє до кормороздавача, то вимикач В повинен знаходитись у лівому замкненому положенні. При наповненні кормороздавача розмикаються контакти кінцевого вимикача ВК, відключається завантажувальний транспортер і після певної витримки часу відключається вся потокова лінія.
|
€.3. Принципова схема управління процесом роздачі кормів кормороздавачем РКС-3000М |
Для роздачі всіх видів грубих кормів і силосу при прив’язному утриманні корів найчастіше застосовують стаціонарні ланцюгові роздавачі ТВК-80А. Кормороздавач складається із завантажувального бункера з натяжним пристроєм, дерев’яних годівниць ланцюга з скребками та приводного електродвигуна потужністю 6 кВт. Корм до бункера завантажують пересувними кормороздавачами КТУ-10, ПТУ-10К або РМ-5. Управління процесом роздачі кормів здійснюється вручну з пульта управління. Сигнали про заповнення годівниць подаються за допомогою кінцевих вимикачів та реле, що вмикають сигнальні пристрої.
У свинарниках при груповому утриманні свиней використовують стаціонарний роздавач РКС-3000М, яким можна роздавати сухі та зволожені до 70 % корми. Готовий корм збункера-дозатора подається завантажувальним транспортером, звідки за допомогою скребків надходить до годівниць.
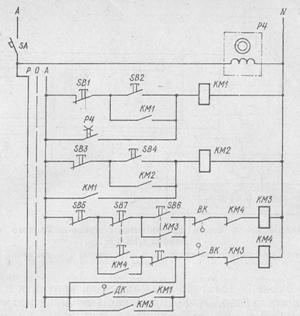
В автоматичному режимі в заданий програмою час спрацьовує програмне реле РЧ (рис. 6.3) і замикає свої контакти в колі котушки магнітного пускача КМ\. Магнітний пускач своїми контактами вмикає КМ2 — магнітний
|
6.4. Функціональна схема автоматизації тросо-шайбового кормороздавача КШ-0,5: І — бункер; 2 — привод транспортера; 3 — дозатори; 4 — годівниці; 5 — транспортер |
пускач бункера-дозатора і замикає свої контакти в котушці магнітного пускача Д'МЗ. Коли корм починає надходити із завантажувального транспортера, замикаються контакти датчика ЦК і включиться магнітний пускач роздавальної платформи Д’МЗ. Як тільки платформа буде заповнена, вона натисне на кінцевий вимикач ВК. При цьому його розмикаючі контакти розімкнуться, а замикачі замкнуться. Відключиться пускач КМЗ і включиться КМ4. Відбудеться реверсування двигуна платформи і корм скребками почне скидатись в годівниці. Одночасно платформа заповнюватиметься кормом для другої половини годівниць. В іншому граничному положенні платформа знову натисне на ВК, тоді включиться КМЗі відключиться КМ4. Платформа змінить напрямок руху і почне скидати корм в другу половину годівниць. Так триватиме доти, поки реле часу РЧ своїми контактами не виключить роздатчик. Якщо корм буде витрачений раніше, то датчик ДК раніше відключить обладнання.
При нормованій годівлі сухими кормами (наприклад, комбікормами) і широкому діапазоні норм видачі застосовують тросово-шайбові транспортери КШ-0,5, які забезпечують індивідуальне дозування. Згідно з функціональною схемою автоматизації (рис. 6.4) управління роздачею кормів здійснюється так. ГІри включенні в рух транспортеру об’ємні індивідуальні дозатори заповнюються кормом. Ступінь заповнення залежить від висоти встановлених на
|
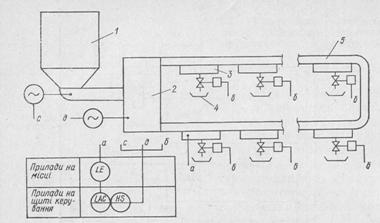
6.5. Функціональна схема автоматизації кормороздавальної гідравлічної системи: І — гідронасос; 2 — головний клапан; 3 — лінія кормороздачі; 4 — годівниця; 5 — місцевий клапан дозування; 6 — клапан повернення; 7 — клапан скидання |
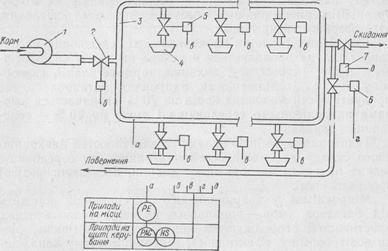
дно телескопічних насадок. Датчик рівня, встановлений в останньому дозаторі сповіщає систему управління про готовність її для роздачі. Видача корму проходить в зазначений час одночасним включенням солеїдних заслінок 5.
Найкращими вважаються гідравлічні кормороздавачі для рідкого корму (рис. 6. 5) Кормороздаюча система включає гідронасос 1, яким забезпечує постійність тиску в системі. До кожної годівниці 4 від магістралі виконана відпайка через кормороздаточний клапан. Послідовне відкриття клапанів дозволяє точно дозувати видачу кормосу- мішї за часом відкриття клапану.
Клапани 6 і 7 забезпечують повернення решток та скидання рідини з магістралі при її промиванні та дезин- фекції.