5.7. Автоматизація процесу напування птиці
Автоматичний пристрій для подачі води (рис. 5. 28) призначений для автоматичного регулювання подачі води в нагромаджувач. Він складається із регульованої місткості 5 (рис. 5. 28) із змінним за висотою перерізом. Місткість зверху канатом 7 з’єднана з тягарем 6, знизу жорстко з’єднана з запірним клапаном 2. Гідрокоробка встановлена на трубопроводі 1 і сполучена водоподаючим патрубком 10 з резервуаром 8 для води. Принцип дії пристрою такий. З витратою води рівні в резервуарі 8 і в місткості 5 знижуються. При цьому кількість води в місткості зменшується спочатку незначно, а потім швидкість витікання води поступово збільшується, оскільки місткість спорожнюється ступінчасто, починаючи з меншого об’єму. Після поступового випорожнення місткість під дією напора в трубопроводі і тягарця повільно піднімається, в результаті чого шток піднімає клапан і відкриває доступ води із трубопроводу в гідрокоробку. Так заповнюється резервуар. Коли вода досягне рівня води в резервуарі вище місткості, вона із
5.28. Автоматичний пристрій для подачі води:
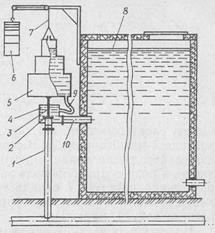 1 — трубопровід; 2 — клапан; 3 — шток; 4 — гідрокоробка; 5 — місткість; 6 — тягарець; 7 — тросик; 8 — резервуар; 9 — шланг; 10 — патрубок
1 — трубопровід; 2 — клапан; 3 — шток; 4 — гідрокоробка; 5 — місткість; 6 — тягарець; 7 — тросик; 8 — резервуар; 9 — шланг; 10 — патрубок
гідрокоробки через гнучкий шланг надходить до місткості знизу вверх, починаючи з більшого об’єму. У міру заповнення місткості її маса стає більшою за зусилля тягарця. В результаті чого запірний клапан перекриває гідропровід.
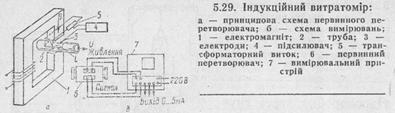
Індукційні витратоміри. Принцип дії таких витратомірів грунтується на законі електромагнітної індукції, відповідно до якого наведена в провіднику електрорушійна сила Е пропорційна швидкості V переміщення його в магнітному полі:
Е = ВІУ.
Магнітне поле з магнітною індукцією В при цьому створюється електромагнітом (рис. 5.29, а), а роль провідника І, що рухається в магнітному полі, виконує частина електропровідної речовини в відрізку немагнітної труби 2. Наведена е.р.с., пропорційна швидкості потоку V, є мірою витрати речовини. Вона знімається двома електродами 3 і подається на підсилювач 4. Одночасно в стовпчику речовини, як у вторинній обмотці трансформатора наводиться е.р.с., яка перешкоджає вимірюванню. Для її знешкодження до одного із електродів, вмонтованого в трубу, приєднується виток, що замкнутий на низькоом- ний резистор 5. Пересуваючи повзунок резистора можна встановити його так, щоб трансформаторна е.р.с. шуму наближалась до нуля.
Електромагнітний метод дозволяє вимірювати витрати у тих випадках, коли інші методи непридатні.
Найпоширеніший на птахофабриках індукційний витратомір ІР-51 складається із первинного перетворювача ПР-1 і вимірювального блока ІУ-51, змонтованого в щиті.
Перетворювач витрати 6 складається із труби та електромагніту (рис. 5.29,6). Труба виготовлена із немагнітного нержавіючого матеріалу, а внутрішня поверхня її вкрита ізоляційним матеріалом. По обидва боки труби роз-
|
|
міщені електромагніти, які складаються із двох однакових котушок і магнітопроводу. В середній частині труби введені два електроди, ізольовані від стінок. Перетворювач встановлюють в розрив трубопроводу за допомогою фланців. Вимірювальний пристрій 7 складається з двох дроселів з елементами Хола і трьох трансформаторів (вхідного, зворотного зв’язку і мережі).
На титульну частину виведенні індикатор установки нуля, резистор регулювання нуля 10, сигнальна лампа, перемикач для точної установки нуля і вимикач мережі. При ввімкненні живлення 220 В вимірювальний перетворювач
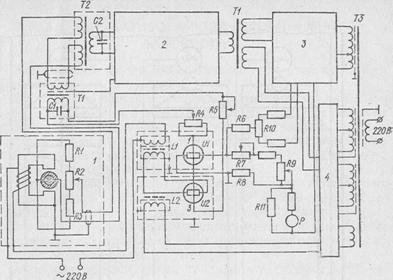
1 (рис. 5. 30) видає з резистора Я2 сигнал, пропорційний витраті речовини. Оскільки магнітний потік, що перетинає стовпчик речовини, змінний, то е. р. с. сигналу також буде змінна. Цей сигнал надходить на вхідний трансформатор 7’2, а потім на підсилювач змінного струму 2, складеного на п’яти транзисторах. Підсилювач не тільки збільшує сигнал, але й повертає його по фазі на 180°. В середню точку первинної обмотки трансформатора Т2 ввімкнена вторинна обмотка трансформатора ТІ, через який надходить сигнал від’ємного зворотного зв’язку.
Вихідний трансформатор ТІ підсилювача 2 має дві вторинні обмотки, за допомогою яких відбувається розподіл підсиленого сигналу на основний (детектор 3) та квадратурний (детектор 4). В основному каналі знешкоджується трансформаторна е. р. с. і виділяється корисний сигнал, в квадратурному — виділяється трансформаторна е. р. с., зсунута відносно корисного сигналу на 90°.
Сигнал від’ємного зворотного зв’язку формується на двох елементах Хола £Л та и2, кожен з яких являє собою пластину з чотирма виводами, розташованому в магнітному полі.
З вихода детектора основного каналу сигнал постійного струму пропорційний витраті речовини, надходить на прилад Р з шунтом #11, подільник від’ємного зворотного зв’язкуЯ7, і на елемент Хола и 1 (модулятор основного
каналу), розташований в магнітному зазорі дроселя ІЛ.
|
5.30. Принципова схема витратоміра ІР-51: 1 — вимірювальний перетворювач; 2 — підсилювач змінного струму; 3 — ос новний детектор; 4 — квадратурний детектор |
Обмотка дроселя L1 ввімкнена послідовно в коло живлення обмотки збудження первинного перетворювача витрати.
В результаті взаємодії змінного магнітного поля і постійного струму, пропорційного витраті на затискачах на* пруги елемента Хола, виникає змінна напруга частотою 50 Гц, пропорційна магнітному потоку і струму.
Модулятор квадратурного каналу виконаний на еле- менті Хола U2, розміщеного в магнітному полі дроселя L2. Обмотка дроселя живиться постійним струмом від детектора квадратурного каналу і струмсм зміщення робочої точки від стабілізованого джерела.
Струмове коло елемента Хола V2 живиться змінним струмом частотою 50 Гц. В результаті взаємодії постійного магнітного поля і струму частотою 50 Гц на затискачах
1 і 3 /72 виникає змінна напруга, пропорційна значенню трансформаторної перешкоди. Обидві напруги компенсації відносно зсунуті на 90°. Коло корекції, яке складається
2 потенціометра R10, на який подається постійна стабілізована напруга, служить для встановлення нуля витратоміра. Наявність уніфікованого сигналу постійного струму 0—5 мА дозволяє під’єднувати до вимірювального пристрою витратоміра блоки ГСП, а також використовувати їх в мікропроцесорних системах контролю та керування.
|
|
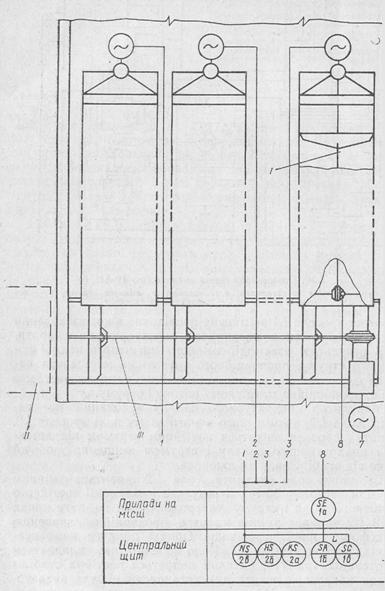
5.31. Схема автоматизації прибирання посліду в пташнику:
1 — поздовжній транспортер; II — накопичувач посліду; III — попере1
транспортер