1.3. Об’єкти автоматизації у сільському господарстві та їх математичні моделі
При розробці систем автоматизації кожний технологіч- ний процес, машина, устаткування, апарат, що підлягає автоматизації, називаються об’єктами автоматизації.
Об’єкт автоматизації — це одне із центральних понять у теорії автоматичного регулювання та управління. Його властивості визначають склад комплексу технічних засобів та алгоритм управління. Тобто, об’єкт автоматизації можна розглядати як деякий базис, а всі інші елементи системи як надбудову.
У сільськогосподарському виробництві найбільш сприятливі умови для автоматизації забезпечуються для стаціонарних процесів у тваринництві, закритому грунті, переробки та зберігання сільськогосподарської продукції. Останнім часом завдяки розвиткові мікроелектроніки стала можливою автоматизація мобільної техніки: тракторів, комбайнів, сівалок.
Таким чином, об’єктами автоматизації у сільському господарстві є: технологічні процеси (створення мікроклімату, приготування та роздача кормів, сушіння та очищення продукції, стабілізація рівня рідин), окремі механізми та апарати (стабілізація частоти обертання робочих машин, забезпечення завантажування драбарок та ін.).
Об’єкти автоматизації можна класифікувати так: прості та складні; із зосередженими та розподіленими параметрами.
У простих об’єктів — динамічні властивості описуються за допомогою двох узагальнених координат (входу та виходу). Динаміка складних об’єктів для опису потребує не менше трьох координат. Динамічні та статичні властивості об’єктів із зосередженими параметрами постійні в усіх їх просторових точках. Об’єкти із розподіленими, навпаки, потребують ще й просторової координати, оскільки їхня динаміка у різних просторових точках різна. Тому об’єкти із розподіленими координатами є ще й складними.
Властивості об’єкта управління дозволяють визначити алгоритм управління та підібрати комплекс технічних засобів для його реалізації. При цьому користуються математичними моделями об’єктів автоматизації у вигляді передаточних функцій. Передаточні функції (зображення лінійних диференційних рівнянь) можуть бути одержані за результатами аналітичних та експериментальних досліджень.
Аналітичні методи дослідження об’єктів. У цьому випадку користуються одним із трьох відомих законів збереження: кількості енергії, руху, речовини. Так, для сільськогосподарського виробництва закони збереження можуть бути ітерпретовані таким чином: для теплових об’єктів
![]()
де т — маса об’єкту; с — питома теплоємність; 0 — температура; фт — сума теплових потоків, що направлені на об’єкт та з нього;
де / — момент інерції; оз — кругова частота обертання; М — сума моментів;
для об’єктів, що здійснюють лінійний рух
![]()
![]()
![]()
![]()
![]()
![]()
![]()
де V — лінійна швидкість; Р—сума сил, що діють на об’єкт;
для об’єктів, які наповнюються рідинами
де 5 — площа основи резервуарів; /і — рівень рідини; С} — потоки рідин;
для об’єктів, які піддаються сушінню або зволоженню
де т0 — маса абсолютно сухої речовини; со — відносна вологість; V? — маса вологи, що надходить за одиницю часу. Аналіз виразів (1.1, 1.2, 1.3, 1.4, 1.5) дозволяє записати:
де х, у — вхід та вихід об’єкта; Ь — незмінні його властивості.
У кінці попереднього століття А. Стодола отримав рівняння, яке може бути використаним для визначення передаточних функцій об’єктів:
де Та — час розгону об’єкту; б — коефіцієнт самовирівнювання; \у — відхилення змінних на вході та виході об’єкту.
Залежно від знаку б об’єкти автоматизації поділяються
на:
|
Коефіцієнт самовирівнювання А. Стодола визначив як
|
Де Хо, у о—вхідна та вихідна величини для статичного режиму.
Коефіцієнт самовирівнювання дозволяє визначити постійну часу та коефіцієнт передачі об’єкту:
![]()
Тобто, коефіцієнт самовирівнювання надзвичайно важлива характеристика для об’єкту автоматизації.
Час розгону об’єкту Га визначається як
де U — ємність об’єкту (його здатність нагромаджувати або витрачати енергію або речовину); уп—номінальне значення вихідної величини.
Розглянемо на прикладі резервуара, як із використанням рівняння Стодоли можна знайти його передаточну функцію.
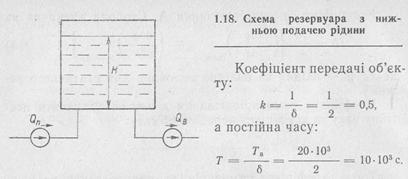
Приклад 1.1. Резервуар з нижньою подачею рідини
(рис. 1.18) Qn = У5 — Н та витратою QB = const має таку характеристику: площа основи S = 5 м2, номінальний рівень //0 = 4 м, перевищення припливу над витратою в статичному режимі AQ = 1 • 10~3 м3/с. Знайти передаточну функцію резервуара.
![]() Коефіцієнт самовирівнювання:
Коефіцієнт самовирівнювання:
|
Остаточне диференційне рівняння, яке описує властивості резервуара, матиме вигляд: |
|
|
|
а передаточна функція після застосування перетворення Лапласа:
|

Таким чином, для наведених умов резервуар, як об’єкт автоматизації, являє собою аперіодичну ланку.
Існує також і другий підхід при побудові математичних моделей об’єктів аналітичним методом — класичний, який потребує знань фізичних явищ, що відбуваються в даному об’єкті.